Adam Trizuljak
My projects in Embedded, IoT, Robotics and more
Project maintained by 3zuli Hosted on GitHub Pages — Theme by mattgraham
Robotics
Swarm of Crazyflie 2.0 quadcopters
2016, Bachelor thesis, Internship at DLR Robotics and Mechatronics Center, Germany.
I created the basic infrastructure for control of a swarm of miniature semi-autonomous Crazyflie 2.0 quadcopters and for obtaining measurements from on-board sensors. A PD position controller and a new quaternion-based PD attitude controller were implemented in firmware. In addition, I implemented a set of programs for communicating with the quadcopters and for sending simple trajectories. The poses of all drones are measured with a Vicon motion tracking system. The quadcopters only receive their current position and a desired position setpoint. The quadcopters have the ability to detect collisions and landings and are capable of flight in turbulent airflow.
ADIS16488 IMU driver for Teensy 3.6
2017
Our university mobile robotics team was working on a four-wheeled robot, for which we wanted to integrate the highly precise (and very expensive) Analog Devices ADIS16488 9-axis IMU. I forked an existing driver for ADIS16448 and modified it for the ADIS16488. The code runs on a Teensy 3.6 board, which reads raw data from the IMU and streams it to the host PC. Other members of the team designed a PCB for the IMU and the Teensy and implemented a ROS node that received data from the Teensy.
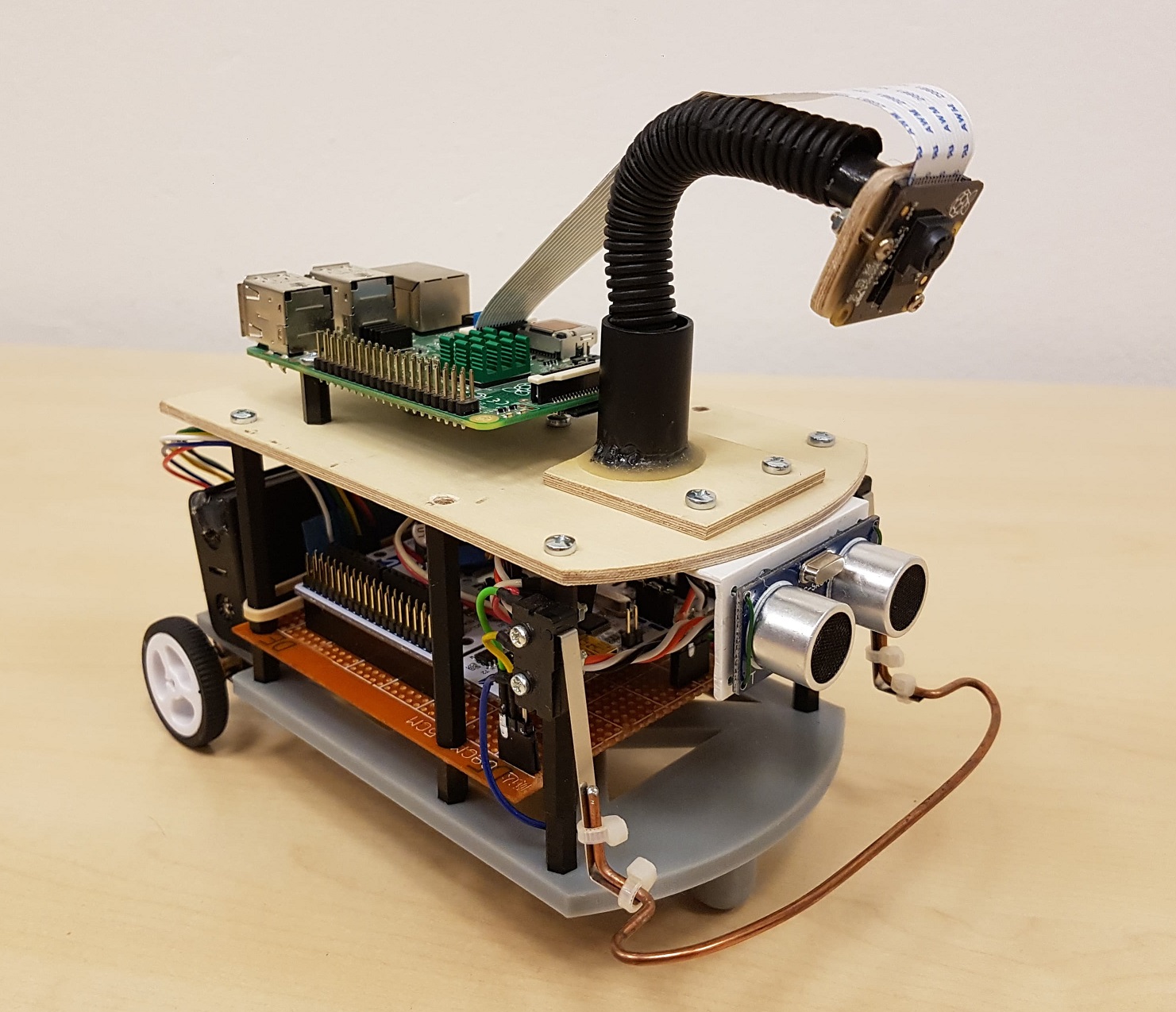
PID motor control for differential drive robot
2018
This was a team project aimed at creating a line follower robot for the Istrobot competition. My role was to develop the firmware for the STM32 processor, which performs low-level PID speed control of the drive motors.
- STM32F411, firmware developed with STM32 Cube IDE
- Two DC geared motors with hall effect encoders, ultrasonic sensor, front bumper switch
- Raspberry Pi uses camera to find the line and sends motion commands to the STM
- STM reads encoders with timers in encoder mode, performs a PID control loop for each motor, sends odometry and sensor states to RPi
Project report (pdf, Slovak only)
PID control of model gantry crane
2017
Assignment for our Mechatronic system control course. The project was realized using Matlab and Simulink. The work consisted of
- Performing system identification of the crane to create a simulation model
- Using the simulation model to design and tune a controller in simulation
- Using the developed controller to control the physical crane
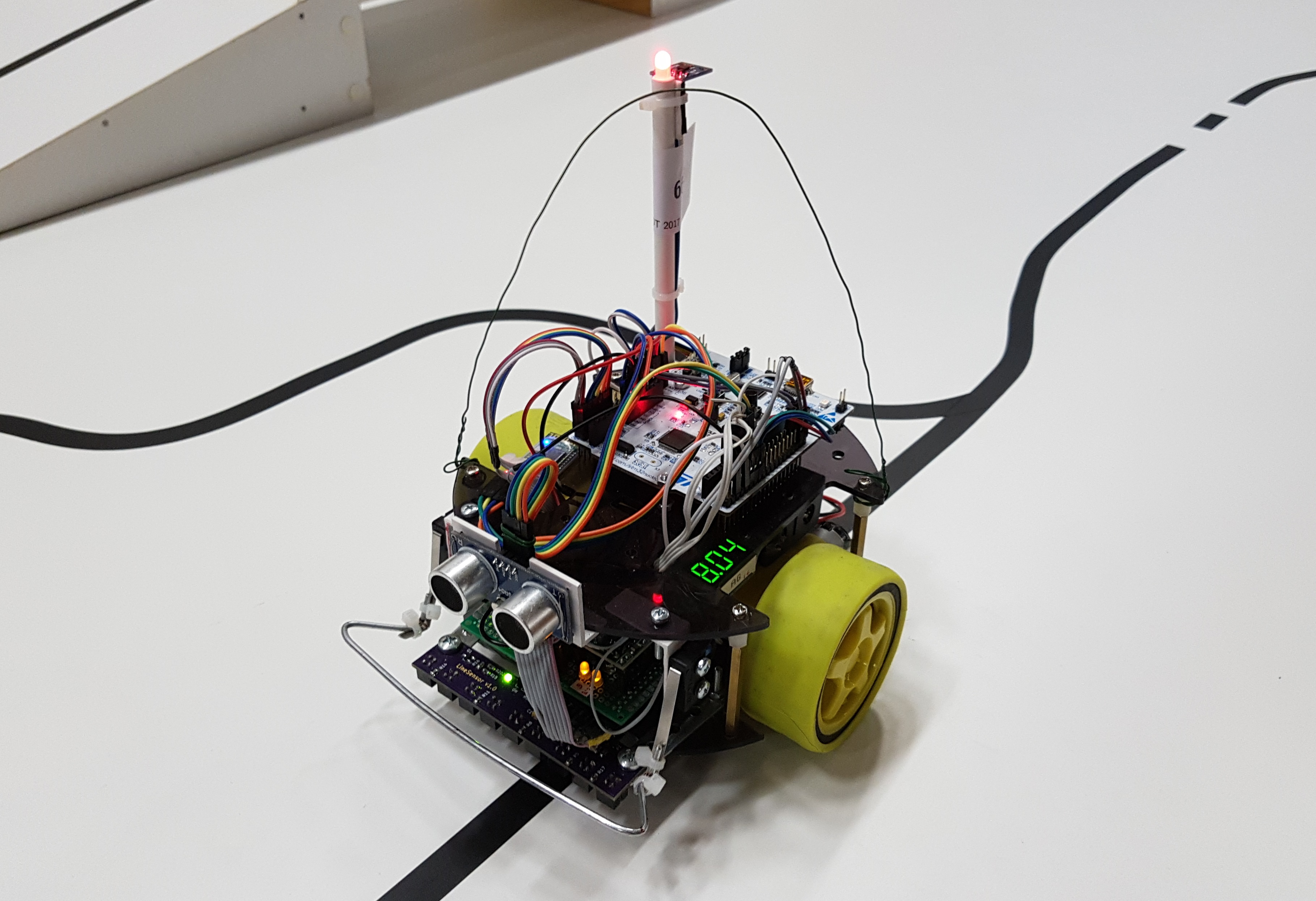
STM32 Line follower
2017
My own attempt at building a line follower robot for the Istrobot 2017 competition.
- STM32L152, firmware developed using mbed.com
- Line following with 9x CNY70 sensor (custom PCB) and PID control
- Ultrasonic sensor and front bumper switch for detecting obstacles
- Magnetometer for heading control while avoiding an obstacle
The actual line following worked pretty well. However, the robot was built using a cheap 2 wheel robot chassis kit and the motors weren’t strong enough to climb the bridge on the competition track.